Tutorial
First, you should run the game_controller_spl node that handles communication with the SPL GameController. You must provide the versions of the GameController data and return data that you want to use as parameters.
ros2 run game_controller_spl game_controller_spl --ros-args -p rcgcd_version:=16 -p rcgcrd_version:=4
Note
Change the rcgcd version and rcgcrd version to match your GameController
List the topics:
ros2 topic list -t
You should see the following amongst the listed topics:
/gc/data [game_controller_spl_interfaces/msg/RCGCD16]
/gc/return_data [game_controller_spl_interfaces/msg/RCGCRD4]
Echoing data from GameController
To access GameController data from within your own node, simply subscribe to the /gc/data topic.
The game_controller_spl node receives UDP packets from the GameController, converts them to ROS msgs and publishes them as ROS topics.
/gc/data is the topic that it publishes to.
Bring up a GameController instance, following instructions in the GameController README:
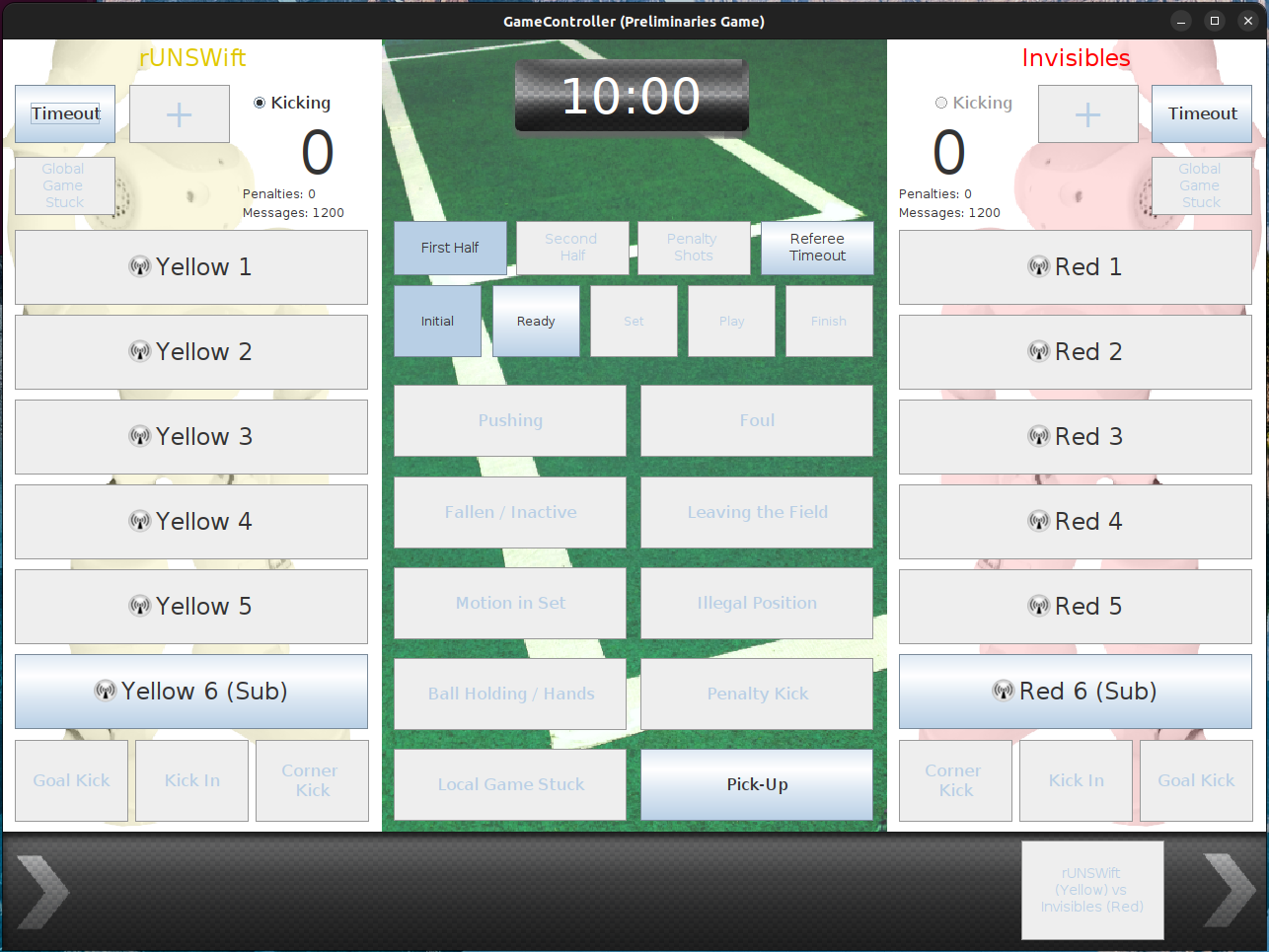
Use the following command to echo the /gc/data topic:
ros2 topic echo /gc/data
You should see the data from the GameController being echoed similar to the following:
packet_number: 202
players_per_team: 6
competition_phase: 0
competition_type: 0
game_phase: 0
state: 2
set_play: 0
first_half: 1
kicking_team: 5
secs_remaining: 600
secondary_time: 0
teams:
- team_number: 5
field_player_colour: 3
goalkeeper_colour: 3
goalkeeper: 1
team_colour: 0
score: 0
penalty_shot: 0
single_shots: 0
message_budget: 1200
players:
- penalty: 0
secs_till_unpenalised: 0
.......
- team_number: 0
field_player_colour: 0
goalkeeper_colour: 0
goalkeeper: 1
team_colour: 0
score: 0
penalty_shot: 0
single_shots: 0
message_budget: 1200
players:
- penalty: 0
secs_till_unpenalised: 0
.......
Sending data to GameController
To send data from within your own node, simply publish to the /gc/return_data topic.
The game_controller_spl node listens on the /gc/return_data topic, converts them to UDP packets and sends them to the GameController.
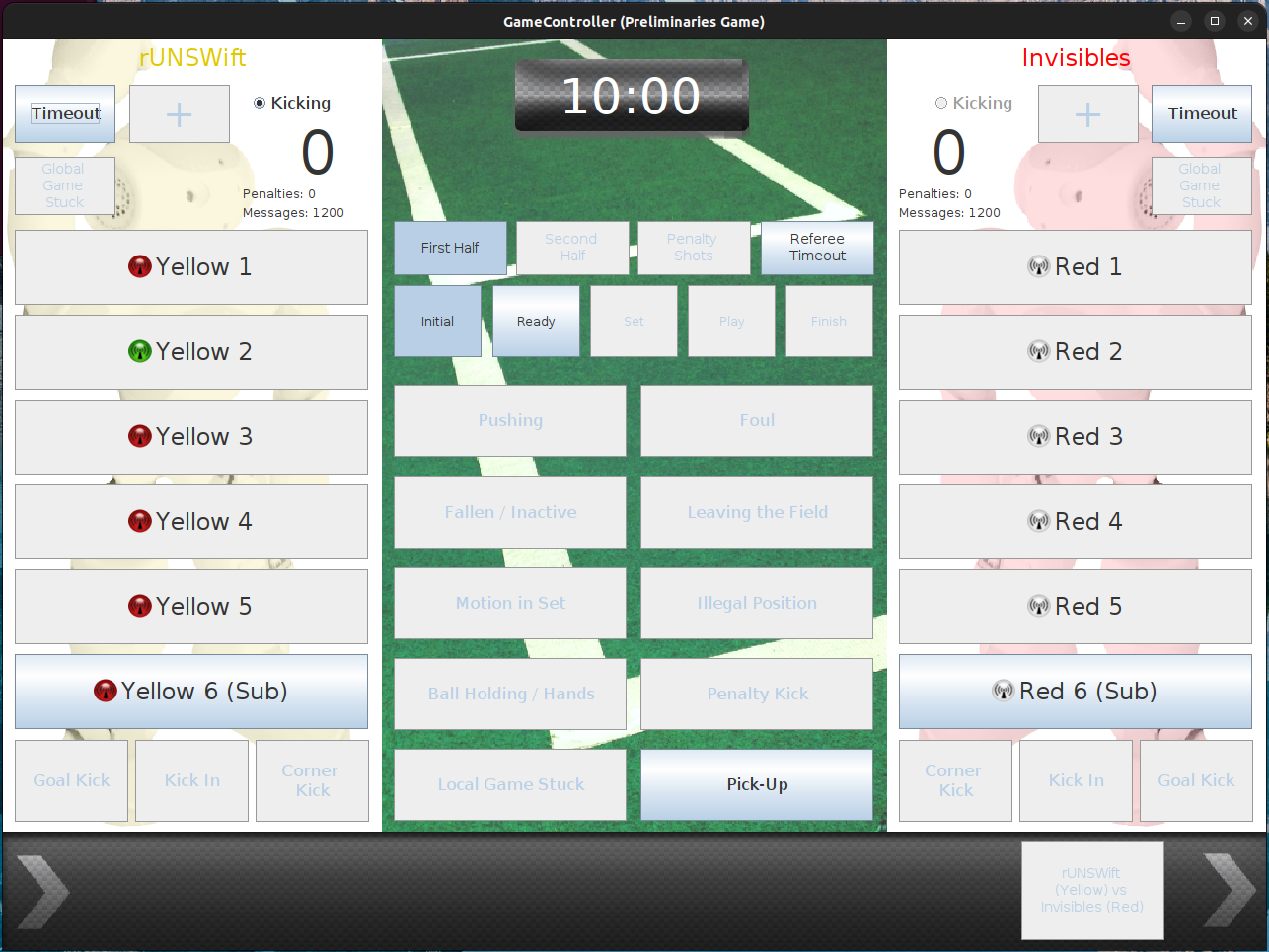
Bring up a GameController instance with one team set to team 18 (rUNSWift), following instructions in the GameController README:
Use the following command to publish a msg to the topic:
ros2 topic pub --once /gc/return_data game_controller_spl_interfaces/msg/RCGCRD4 "{player_num: 2, team_num: 18}"
You can see that the GameController is reporting a green light for team rUNSWift’s player 2, indicating a message has been received recently.